はじめに: 搬送ロボット導入において見落とされがちな「連結プロセス」の課題
物流センターや製造現場における人手不足への対応やデジタルトランスフォーメーション (DX) の一環として、AGV(無人搬送車)やAMR(自律搬送ロボット)の導入が進んでおります。一方で、システム設計の段階で、搬送プロセスの前後で発生する物理的な「連結・切り離し」作業が人手に依存したままになるケースが多く見受けられます。この点は、自動化の投資対効果(ROI)を初期段階から制限してしまう要因の一つになり得ると考えられます。
ロボットによる搬送と人間による連結作業が混在する運用は、スムーズであるべきワークフローを分断し、「自動化の部分最適」を生み出してしまう傾向があります。ロボットと作業員の双方に待機時間が発生し、業務が一時中断されることで、全体の生産性向上に繋がりにくい状況が生じます。結果として、せっかく導入された自動化設備が、本来持つ潜在能力を十分に発揮しきれないケースがあります。
本ホワイトペーパーでは、この「連結プロセスの課題」に焦点を当て、シーオス株式会社が提供する自律搬送ロボット「TUGBOT2」の「Auto hitching/unhitching(自動連結・切り離し)」機能が、いかにしてこの課題を和らげ、無人搬送の実現に寄与するかについて説明します。
課題分析: 「連結作業」が搬送効率に与える影響
効果的な自動化と生産性向上の第一歩は、既存のワークフローに潜む課題や滞留ポイントを特定することから始まると言えます。牽引型ロボットの運用において、搬送効率に影響を与えやすい要因の一つが、搬送プロセスの始点と終点における人手の介在です。
- 手動運用において発生しやすいフロー上の課題:手動による連結・切り離しを前提とした一般的なワークフローは、以下のようなステップに分けられます。
- 始点(積み込みエリア): ロボットが指定場所に到着後、作業員の方がカゴ車を所定の位置にセットし、手動で連結作業を行ったうえで、ロボットの発進操作を実施します。
- 終点(荷降ろしエリア): ロボットが目的地に到着して待機し、作業員の方がその場に到着するのを待ってから手動で切り離し作業を行います。
このフローには、「ロボットが人を待つ時間」と「人がロボットの到着に合わせて移動する手間」という、リソースの相互の無駄が生じやすいという側面があります。AMRが手作業のために待機状態となり、一方で作業員が本来の業務を中断して移動に時間を費やすことになってしまいます。
生産性向上のためには「モノの移動」をスムーズにすることが重要ですが、この連結プロセスにおける人の介在が、ロボットのポテンシャルを引き出す上でのひとつのハードルになっていると考えられます。この課題を解消していくことが、24時間稼働や変動する需要に柔軟に対応できる自律的な物流システムの構築に繋がるのではないでしょうか。
解決策へのアプローチ: TUGBOT2の「Auto hitching/unhitching」技術
前述した「連結プロセス」の課題に対し、シーオスの自律搬送ロボット「TUGBOT2」は、その核となる機能「Auto hitching/unhitching(自動連結・切り離し)」によって、ひとつの解決策を提供します。この技術は、搬送プロセスの始点と終点から人手による作業を省き、エンドツーエンドでの自動化をサポートするために設計されています。
機能の概要と動作の仕組み
Auto hitching/unhitching 機能の特徴は、自律的な動作の仕組みにあります。
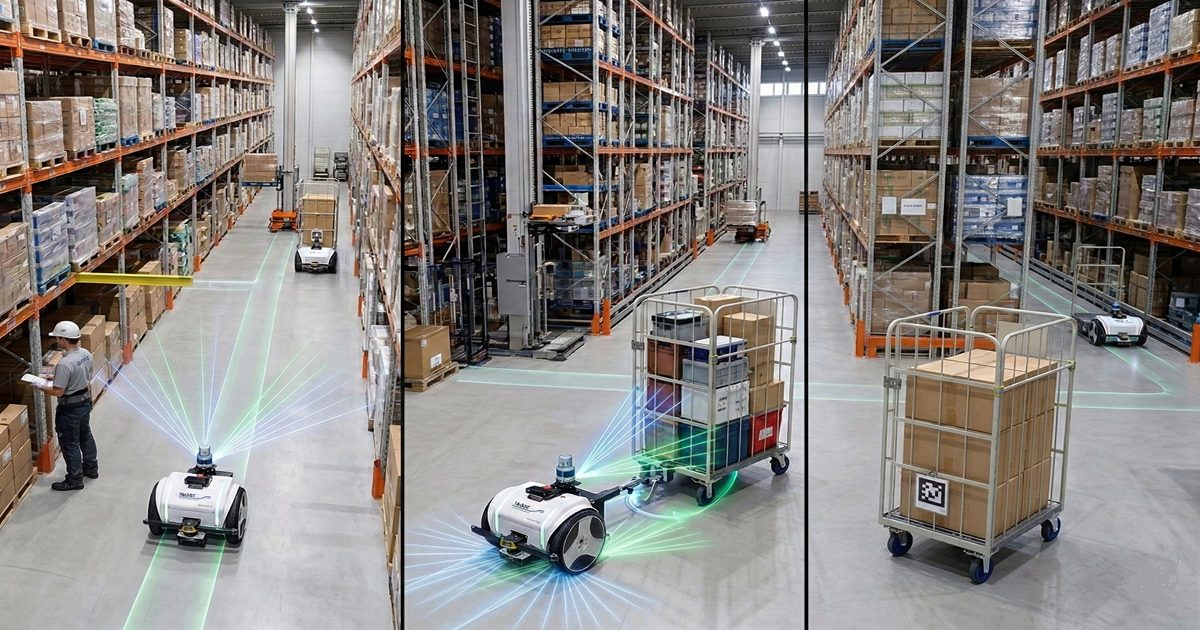
TUGBOT2は、搬送指示を受けると対象となるカゴ車や台車へ自動で近づき、内蔵されたフック機構を用いて物理的に連結(ヒッチング)します。目的地への搬送が完了すると、同様に自動で連結を解除(アンヒッチング)し、次のタスクに備えます。この一連の動作がロボット単独で行われるため、作業員は連結・切り離し作業に関与する必要がなくなります。
既存資産の有効活用: 汎用台車への対応
多くの物流・製造現場では、すでに数多くの台車やカゴ車が活用されています。これらをすべてロボット専用のカートに置き換えることは、コスト面でも運用面でもご負担が大きいと考えられます。TUGBOT2の一つの利点は、そうした既存の資産をできる限りそのまま活用できる柔軟性にあります。
以下の汎用的な既存資産に対し、簡単なアタッチメントを取り付けることで対応が可能となります。
- カゴ車(ロールボックスパレット)
- 6輪台車
- ドーリー
現場でご利用中の資材の形状に合わせて専用設計された「治具(アタッチメント)」を装着するだけで、既存の台車群を自動化の仕組みに組み込むことができます。これにより、導入コストを抑えつつ、スムーズな移行を図ることができます。また、標準的な治具で対応が難しい特殊な台車につきましても、パートナー企業との協業により、専用治具の開発・提案の対応が可能です。
技術詳細: 無人化されたワークフローの流れ
Auto hitching/unhitching 機能の仕組みを理解するために、タスクの開始から完了までの一連の無人搬送プロセスを3つのステップに分けて説明します。
ステップ1: タスクの割り当てと対象の特定
無人搬送は、TUGBOT2へのタスク割り当てから始まります。この指示は、上位のWMS(倉庫管理システム)との連携や、現場のタブレット操作などを通じて行われます。タスクを受信したTUGBOT2は、対象となるカゴ車がある場所へ自律的に移動し、「どのカゴ車を搬送すべきか」を識別します。
- ARマーカー方式: カゴ車本体や周辺の壁面に貼付されたARマーカー(QRコードなど)を、TUGBOT2に搭載されたカメラが読み取ります。これにより、対象物の位置を把握し、搬送すべきターゲットを特定します。壁面マーカーは駐車位置や待機場所の目印としても利用でき、運用の安定化に寄与します。
- 画像識別(開発中): 将来的には、カゴ車の形状や荷姿そのものを画像認識技術で識別し、マーカーレスでの運用を目指す開発も進めております。これにより、さらに柔軟な運用が可能となります。
ステップ2: 精密なアプローチと自動連結
搬送対象を識別した後、自動連結プロセスに入ります。ロボットはターゲットに対して後退しながら近づき、位置を合わせます。この際のアプローチの正確性や安全性は、搭載されたセンサー群によってサポートされています。
- 3D-LIDAR: 周辺環境との精密な距離測定と障害物検知を実行し、スムーズなドッキング軌道を確保します。
- ステレオカメラ: 人間の両眼のように奥行きを認識し、LiDARだけでは捉えにくい複雑な形状の障害物や、上部からの張り出しなどを検知することで、安全性を多層的に確保します。
ステップ3: 自律搬送と自動切り離し
連結が完了すると、TUGBOT2は最大500kg(牽引什器を含む)までの重量物を牽引し、指定された目的地(出荷バースや次工程の作業エリアなど)まで自律走行します。
到着後、フックを自動で解除し、カゴ車を切り離してタスクを完了させます。
このステップがもたらす運用上の利点の一つは、「搬送対象物がなくなるまで、自動で繰り返し搬送が可能になる」という点です。これにより、作業のスループットが人間のシフト体制に左右されにくくなります。管理者の方から指示をしておくだけで、夜間シフト中に原材料を供給したり、日中の稼働終了後に完成品を倉庫へ搬送したりといった、24時間稼働に近い形での運用も視野に入ってきます。労働力への依存を減らしつつ、設備の稼働時間を延ばすための一つの選択肢となり得ます。
導入に向けたステップ: 段階的なアプローチと拡張性
TUGBOT2のAuto hitching / unhitching 技術は、現場のDX成熟度に合わせて段階的に導入・拡張できる柔軟性も備えています。いきなり全体を自動化するのではなく、リスクを管理しながら小さな成功(Quick Win)を積み重ねていくことで、社内の理解と協力を得ながら、より高度なシステム連携へと進んでいくアプローチを推奨しています。
フェーズ1: ARマーカーを活用した定型ルートからのスモールスタート
特定プロセスのボトルネックを迅速に解消し、自動化の価値を実証する導入初期段階。
導入の初期段階では、特定の工程間を結ぶ定型的な搬送ルートの自動化から始めるのが効果的です。
- 具体例: 「入荷検品エリア」から「一時保管エリア」への搬送作業の自動化など。
- 仕組み: 搬送対象のカゴ車に「行先情報」を含んだARタグを貼り付けます。TUGBOT2 はこのARタグを読み取ることで自律的に目的地を判断し、搬送を実行します。この方法は、既存の業務フローに大きな変更を加えることなく、特定の課題を迅速に緩和しやすいという利点があります。
フェーズ2: WMS 連携などを通じた動的な運用へのステップアップ
上位システムと連携し、倉庫全体のオペレーションを最適化する本格的なシステム統合段階。
基盤となる自動化が現場に馴染んだ後、次のステップとして上位システムとの連携によって、より高度な運用へと拡張していくことが可能です。
- 具体例: WMSやRFIDシステムと連携した運用。
- 仕組み: 例えば、RFID ゲートを通過したカゴ車のIDをシステムが読み取ります。
WMSは、その情報に基づき「このカゴ車は店舗A向けの出荷バースへ搬送」といった行き先情報を動的に決定します。TUGBOT2はこの情報を上位システムからリアルタイムで取得し、指示された場所に自律的に搬送します。これにより、個々の荷物の状況に応じた柔軟な搬送計画の自動化を目指すことができます。
おわりに: 連結作業の自動化がもたらす現場の変化
本ホワイトペーパーで詳解してきたように、「連結作業」を自動化していくことは、AMR導入の効果を高め、省人化を進めるための一つの重要な要素になると考えられます。人が介在するボトルネックを解消していくことで、自動化への投資ポテンシャルをより引き出しやすくなります。
TUGBOT2のAuto hitching /unhitching機能は、この課題に対する一つの解決策として活用することができます。さらに、カゴ車やドーリーといった既存資産を治具の活用によって流用できる仕組みは、導入のハードルを下げる手助けとなります。この技術を取り入れることで、現場スタッフを連結・切り離しといった単純な付帯作業から解放し、システムの管理や検品、改善活動といった、より付加価値の高い業務へリソースの一部を振り向けることが可能になると考えます。
シーオスは、お客様の現場環境の評価から、最適な治具の選定、そして上位システムとの連携に至るまで、End to Endで無人搬送の実現に向けたサポートをさせていただきます。連結プロセスの自動化は、単なる効率化に留まらず、これからの工場や倉庫において、より自律的でレジリエントなデータ駆動型の物流ネットワークを築いていくための基礎的な一歩(foundational step)になると私どもは信じております。





